
Раскачка качелей
Уравнение параметрического осциллятора имеет вид [3]:
 (3.2.1)
(3.2.1)
Название «параметрический» происходит из того, что собственная частота (один из параметров системы) колеблется во времени. Это осциллятор с вынуждающей силой, поскольку колебательный член cos(ωpt) умножается на x(t).
Напишите скрипт Maple для решения уравнения (3.2.1) и графического представления его результатов. Исследуем, как изменяется поведение параметрического осциллятора в зависимости от параметров. Это пример численного эксперимента. Для удобства анализа его результатов сделайте таблицу вроде такой:
| Начальные условия | Параметры | Результаты | Примечание | ||||
|---|---|---|---|---|---|---|---|
| x(0) | v(0) | ω | γ | ε | ωp | ||
(Можете придумать наиболее удобную для вас форму. В графу «Результаты» можно записывать текст, можно вставлять рисунки. Заодно получите материал для отчета по работе.)
(a) Решите уравнение (3.2.1) с начальными условиями x(0) = 0, v(0) = 1 и параметрами ω = 1, γ = 0, ε = 0.1, ωp = 1.1. Нарисуйте решение x(t) для достаточно большого отрезка времени, чтобы было видно, что между естественным движением при ω0 и параметрическим управлением при ωp ничего особенного не происходит, кроме небольших биений.
Снова запустите код при ω0 = 1, ωp = 1, γ = 0 и ε = 0.1 (при таких параметрах естественная частота и частота накачки совпадают). Удостоверьтесь, что система нестабильна, т. е. растет без ограничений.
(b) Снова запустите код при ωp = 2 и посмотрите, что получится (должно быть как на рис. 3.2.1). Проверьте, что ωp = 2ω0 более нестабильна (амплитуда растет быстрее), чем для ωp = ω0.
(c) Численным экспериментом покажите, что при ωp = 2ω0 осциллятор нестабилен для любых ε, но что скорость роста мала для малых ε.
(d) Покажите, что когда ωp не есть точно 2ω0, осциллятор стабилен для малых ε, но когда ε переходит некоторый порог, он вновь становится нестабильным. Найдите этот порог для ωp = 2.05ω0 и для ωp = 1.95ω0.
(e) Теперь добавьте затухание, задав γ = 0.03, и узнайте, сохраняется ли порог ε при ωp = 2ω0.
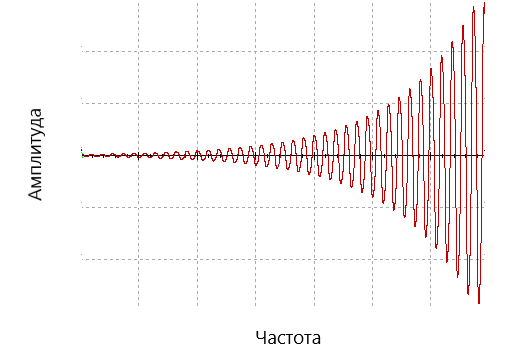
Рис. 3.2.1. Нестабильность и раскачка колебаний
Последнее задание: объясните, почему детей учат раскачиваться с частотой ωp = ω0, если ωp = 2ω0 обладает более быстрым ростом, чем ωp = ω0?
Для объяснения причины нестабильности при ωp = 2ω0 посмотрим на силовой спектр x(t) параметрического осциллятора.
Для интервала от t = 0 до t = 500 сделайте расчет с x(0) = 0, v(0) = 1, ω0 = 1, ωp = 1.3, γ = 0, ε = 0.3, с очень мелким шагом по времени (214, если получится). В полулогарифмическом масштабе постройте спектр Фурье-преобразования. Для анализа удобнее учесть отрицательные частоты.
Большой максимум будет для ±ω0, потому что возмущение ε мало. Но если посмотреть на пик при ω = 1.3, вы его не найдете, даже если там есть много других пиков. Задача теперь состоит в том, чтобы объяснить, откуда взялись эти пики в тех местах, где они есть.
Поскольку ε мало и затухание слабое, то для начала положим ε = 0 и γ = 0. С этими упрощениями (1) имеем решение:
 (3.2.2)
(3.2.2)
Применим теорию возмущений и запишем, что
 (3.2.3)
(3.2.3)
где |x1(t)| << |x0(t)|.
Подставим это в (3.2.1) с учетом (3.2.2), упростим и отбросим члены порядка εx1(t), содержащие произведение двух малых величин.
Покажите (аналитически, без компа), что при γ = 0 результат первого порядка теории возмущений для x1(t) – это:
 (3.2.4)
(3.2.4)

Учтите, что (3.2.4) – это уравнение управляемого гармонического осциллятора. Чтобы определить частоту управления, используйте равенство.
И посмотрите, есть ли такие частоты в спектре Фурье-преобразования (выше)?
В первом порядке теории возмущений мы увидели, что в дополнение к вкладу при ω0 есть еще два меньших вклада, при (ω0 + ωp) и (ω0 – ωp). Во втором порядке теории возмущений имеем такое выражение для x(t):
 (3.2.5)
(3.2.5)
Во втором порядке теории возмущений обнаружится, что каждая частотная компонента первого порядка умножается на cos(ωpt) и получает боковые полосы при ±ωp, их амплитуды меньше, чем у полос первого порядка теории возмущений. Понятно, что такая процедура не имеет конца, и легко догадаться, что уравнение может дать очень богатый спектр.
Теперь о нестабильности при ωp = 2ω0. В первом порядке теории возмущений вы видели, что при параметрическом колебании с частотой ωp система выглядит как возбуждаемый осциллятор с частотами возбуждения ω0 ± ωp. При ωp = 2ω0 суммарная и разностная частоты попадают на 3ω0 и –ω0. Поскольку одна из них, очевидно, есть частота возбуждения ω0, система оказывается в обратной связи сама с собой и становится нестабильной.
Этот эффект позволяет увидеть, почему ωp = ω0 не является самой нестабильной. Причина в том, что при таком выборе суммарная и разностная частоты – это 0 и 2ω0, ни одна из которых не является резонансной. Но боковые полосы второго порядка – это –ω0, ω0, ω0, и 3ω0. Во втором порядке теории возмущений три частоты из четырех – это ω0, что создает возможность нестабильности из-за нелинейного резонанса. Но для получения такого резонанса надо пройти два шага теории возмущений, причем каждый включает следующую степень ε, поэтому такой выбор ωp менее нестабилен.
Применяя аналогичные идеи, объясните все частотные максимумы в разложении Фурье. Объясните, что значат амплитуды разных пиков и откуда появляется нестабильность при ωp = 2ω0.
При раскачке реальных качелей ваши колебания не становятся бесконечными, потому что это маятник, а не гармонический осциллятор. В лагранжевой механике уравнение движения маятника с зависящей от времени длиной l(t)
 (3.2.6)
(3.2.6)
Пусть длина L0 изменяется на небольшую величину ΔL по синусоиде с частотой ωp
 (3.2.7)
(3.2.7)
Решите (в Maple) (3.2.6) с (3.2.7) и реалистичными параметрами. Обычные качели имеют длину L0 = 2 м. Качели раскачивают ногами (сгибая-разгибая колени). Масса ног ≈ 10 % вашей массы, а их выпрямление изменяет среднюю высоту системы относительно точки опоры на ≈ 10 % L0. Сочетание этих двух эффектов дает верхний предел ΔL (изменение положения центра массы раскачивающего качели): ΔL ≈ (0.1) × (0.1) × L0 = 0.02.
(a) Пусть маятник параметрически нестабилен за счет колебаний его длины с частотой 2ω0. Найдите численное решение с начальной амплитудой θ0 = 0.1,  (напоминаю:
(напоминаю: ). Время ≈ 800 с. Почему амплитуда маятника не становится больше?
). Время ≈ 800 с. Почему амплитуда маятника не становится больше?
(b) Раскачивайте качели, как обычно это делают, с  . Проверьте, что амплитуда начинает расти, но скорость роста маловата.
. Проверьте, что амплитуда начинает расти, но скорость роста маловата.
(c) Добавьте потери в уравнение движения, вводя линейное затухание.
Для реальных качелей приемлемо γ = 0.1. Запустите расчет с таким γ и ωp = 2ω0. Затем возьмите ωp = ω0. Постройте графики и используйте их для объяснения того, почему, сгибая-разгибая колени, можно раскачать качели.
Колебания длины l качелей управляют движением, но слабо. Можно раскачать качели таким способом, но вам придется вставать-садиться с частотой ωp = 2ω0, чтобы эффективно управлять системой и преодолеть затухание. Если хотите раскачать сидя, то будет недостаточно только сгибать-разгибать ноги вперед-назад. Подберите параметры и попробуйте их проверить на реальных качелях (если есть где).
Как дети эффективно раскачивают качели? В сидячем положении отклоняются назад при движении вперед и выпрямляются при обратном ходе.
При отклонении назад вы создаете вращающий момент на качели в прямом направлении, а когда выпрямляетесь, вы создаете момент в обратном направлении. Эти разнонаправленные моменты управляют системой как маятником. Малые колебания величины l за счет сдвига центра массы седока во многом случайны.
Рассмотрим модель седока на рис. 3.2.2. Общее положение седока характеризуем углом θ. Сам он описывается массами m1, m2, m3 и может сгибаться – угол φ. Пусть m2l2 = m3l3, тогда функция Лагранжа системы упрощается:
 (8)
(8)
где M = m1 + m1 + m1, I1 = Ml12, I2 = m2l22 + m3l32.
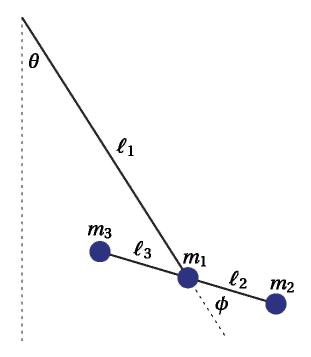
Рис. 3.2.2. Схема к задаче о раскачке качелей (модель седока)
Из уравнения Лагранжа

аналитически получите уравнение движения для θ
 (3.2.9)
(3.2.9)
Покажите, что уравнение движения принимает вид
 (3.2.10)
(3.2.10)
где
 (3.2.11)
(3.2.11)
Это уравнение управляемого маятника, что можно подтвердить прямым сравнением.
В (3.2.10) нет никаких финтов от параметрического осциллятора за счет того, что m2l2 = m3l3 ограничивает возможность изменения длины маятника только изменением φ. Если это ограничение снять (убрав предположение, что m2l2 = m3l3), математика становится неприятной, но окажется, что параметрическое изменение длины не оказывает существенного влияния на нормальные амплитуды раскачивания качелей.
Вычисления для (3.2.5) измените, добавив вынуждающий член вида acos(ωpt). При реалистичных параметрах l2 = l3 = 0.5 окажется, что α = 0.1 достаточна для амплитуды раскачки A = 0.5 (около 30°). Стартуйте из положения покоя и раскачивайте с ωp = ωφ = ω0. Постройте график в интервале от t = 0 до t = 800 и отметьте, что он идет к устойчивой амплитуде и затухающему равновесию. Для анимации используйте код, описание которого приведено ниже.
Задайте:
- массив значений времени (te);
- угол тетa (xe);
- вынуждающую частоту (wphi) (частота накачки);
- амплитуду накачки (А);
- основную длину (L1, см. рис. 3.2.2);
- расстояния «голова – середина тела» и «середина тела – ноги» (L2) tau=te(2) – te(l); L = L1 + L2;
Цикл по значениям te
Вычисление положения подвески относительно крепления:
xswing=ll*sin(xe(istep)); yswing=-ll*cos(xe(istep));
ypers=12*cos(phi);
Вывести рисунок качелей и седока:
plot([0, xswing], [L,L+y swing], [xswing+xpers,xswing-xpers],[L+yswing-ypers,L+yswing+ypers])