
Тензор момента инерции
Рассчитаем матрицу момента инерции в некоторой системе координат и покажем, что можно найти такую систему, в которой матрица диагональна:
- restart; with(LinearAlgebra):
- with(plots): with(plottools):
Начнем с примера, в котором интегралы рассчитываются напрямую.
Имеем однородную среду с постоянной плотностью массы, задаваемой как отношение полной массы к полному объему.
- rho:=M/V;

Пусть тело имеет форму сигары – эллипсоида вращения, описываемого квадратичной формой:
- A:=Matrix([[1,1/2,1/3],[1/2,4,1],[1/3,1,4]]);

- A-Transpose(A);

Полученный нулевой результат показывает, что А выбрана действительной и симметричной:
- EVals:=evalf(Eigenvalues(A));

Числовой шум в собственных значениях (ненулевая комплексная часть) происходит при применении для расчета evalf с 10 знаками.
Матрица имеет положительные собственные значения, которые относятся к неглавным осям эллипсоида. Если бы один (или два) из них были отрицательны, то квадратичная поверхность представляла бы собой листы гиперболоида.
Результат можно предвидеть. В главных осях квадратичная форма имеет вид:
QF = EVals[1]*x^2 + EVals[2]*y^2 + EVals[3]*z^2.
Для выбора шкалы можно положить QF = 1 и получить, что собственные значения равны
EV[i] = 1/a_i2,
где a_i – неглавные оси.
Следовательно, объем эллипсоида рассчитывается как:
- V0:=evalf(4/3*Pi*mul(sqrt(1/EVals[i]),i=1..3));

- seq(Re(sqrt(1/EVals[i])),i=1..3);

Теперь вычислим квадратичную форму (рис. 4.7.1):
- Rv:=Vector([x,y,z]);

- QF:=Transpose(Rv) . A . Rv;

- QF:=simplify(QF);

- surf:=solve(QF-1,z);

- plot3d(surf[1],x=-1.1..1.1,y=-1.1..1.1,axes=boxed,
grid=[30,30],style=patchcontour,shading=zhue,
scaling=constrained);
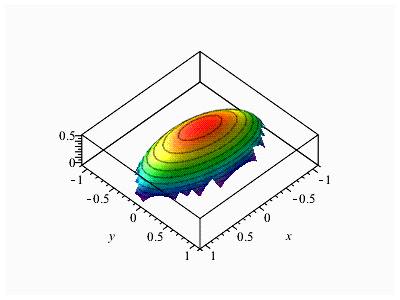
Рис. 4.7.1
Получившийся график выглядит не так, как хотелось бы, поэтому применим implictplot (рис. 4.7.2).
- implicitplot3d(QF-1,x=-1.1..1.1,y=-1.1..1.1,z=-1.1..1.1,
axes=boxed,numpoints=2000,scaling=constrained,
style=patchcontour,shading=zhue);
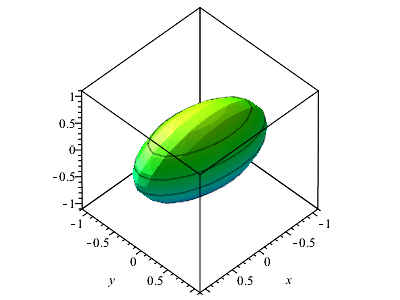
Рис. 4.7.2
- EVecs:=evalf( Eigenvectors(A) );
Нам нужен график трех собственных векторов. Они хранятся в столбцах матрицы (второй вход в Evecs). Надо показать их ортогональность и как они связаны с квадратичной поверхностью (рис. 4.7.3):
- E1v:=convert(SubMatrix(EVecs[2],1..3,1..1),Vector);

- E1v:=Normalize(map(Re,E1v),Euclidean);

- E2v:=Normalize(map(Re,convert(SubMatrix(EVecs[2],1..3,
2..2),Vector)),Euclidean);

- E3v:=Normalize(map(Re,convert(SubMatrix(EVecs[2],1..3,
3..3),Vector)),Euclidean);

- E1 := plottools[arrow]([0, 0, 0], E1v, .2, .4, .1, color=red):
- E2 := plottools[arrow]([0, 0, 0], E2v, .2, .4, .1, color=blue):
- E3 := plottools[arrow]([0, 0, 0], E3v, .2, .4, .1, color=green):
- QFp:=implicitplot3d(QF-1,x=-1.1..1.1,y=-1.1..1.1,
z=-1.1..1.1,axes=boxed,numpoints=2000,scaling=constrained,
style=wireframe,color=gold): - display(E1,E2,E3,QFp,axes=boxed);
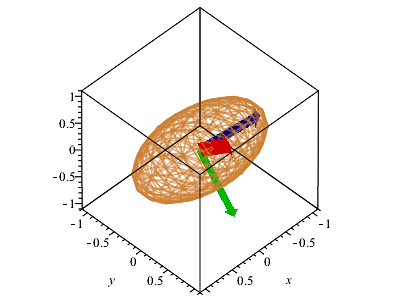
Рис. 4.7.3
- E1v . E2v;

- E1v . E1v;

- E1v . E3v;

- E2v . E3v;

Для лучшего понимания геометрии повращаем картинку.
Изменим матрицу в квадратичной форме и повторим расчеты.
Продолжим конструирование ортогональной матрицы вне нормированных собственных векторов. Преобразуем матрицу, чтобы показать, что она диагонализована этим преобразованием:
- R:=Matrix([E1v,E2v,E3v]);
- Ri:=MatrixInverse(R);
Результаты применения этих команд (выдачи Maple) не приводятся. Их можно посмотреть самостоятельно.
Сделанная из собственных векторов (столбцы) матрица преобразования является ортогональной, т. е. обратная ей получается в результате транспонирования. Теперь рассчитаем преобразование матрицы А матрицей R. Правильный вид получается так (ниже покажем, что другой способ не работает!):
- Ri . A . R;
На диагонали преобразованной матрицы – собственные значения, а недиагональные элементы – нули (приближенно).
- R . A . Ri;
Результаты применения (выдачи Maple) этих команд не приводятся, чтобы можно было в этом убедиться самостоятельно.
Рассчитайте квадратичную форму с помощью диагонализованной матрицы. Сделайте недиагональные элементы нулями (точно), т. е. создайте диагональную форму из собственных значений, и рассмотрите уравнения для квадратичной формы (нет пересекающихся членов).
Выполните преобразование главных осей (как сделано выше) для некоторой другой матрицы А с тремя положительными собственными значениями.
Расчет объема. Можно ли рассчитать объем V в декартовых координатах? Выбираем квадратичную форму и масштабный множитель, равный 1.
Выполним интегрирование по очереди. Вначале интегрирование по z:

- I1:=int(1,z=fz[1]..fz[2]);

- fy:=solve(I1,y);

- plot([fy[1],fy[2]],x=-1.1..1.1,color=[red,blue],
numpoints=800,scaling=constrained);
Результат представлен на рис. 4.7.4.

Рис. 4.7.4
Следуя интегрированию по z, нужно интегрировать I1 по площади, ограниченной кривыми fy[1] и fy[2]. Будем интегрировать по y между нижней (синей) и верхней (красной) кривыми. Затем будем интегрировать по x в пределах. Каковы они? Это точки, в которых производная y(x) становится бесконечной:
- x0:=solve(1/diff(fy[1],x),x);

Прямая попытка взять определенный интеграл неудачна:
- I2:=int(I1,y=fy[1]..fy[2]);
- I3idf:=int(expand(I2),x);
(Получившиеся в результате действия команд громоздкие выдачи не приводятся.)
В конце концов, можно бы взять этот интеграл численно. Для этого нужно знать диапазон x:
- evalf(x0);

- plot(I2,x=x0[1]..x0[2]);
Надо численно интегрировать получившуюся функцию (рис. 4.7.5) и исправить знак.
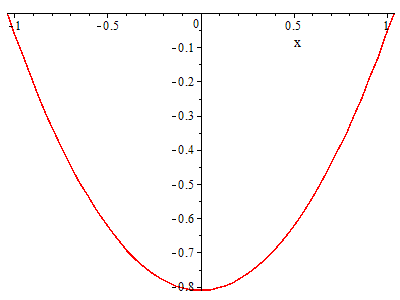
Рис. 4.7.5
- V:=evalf(Int(-I2,x=x0[1]..x0[2]));

- V0:=evalf(4/3*Pi*mul(sqrt(1/Eigenvalues(A)[i]),i=1..3),15);

Объемное интегрирование работает! Из трех интегралов два берутся аналитически, третий – численно.
Теперь рассчитаем матрицу момента инерции:
- M:=1; rho;


- MI:=Matrix(3,3):
- for i from 1 to 3 do: for j from 1 to i do:
- if i=1 and j=1 then w:=Rv[2]^2+Rv[3]^2; elif i=2 and j=2 then w:=Rv[1]^2+Rv[3]^2; elif i=3 and j=3 then w:=Rv[1]^2+Rv[2]^2; else w:=-Rv[i]*Rv[j]; fi:
- I1:=int(w*rho,z=fz[1]..fz[2]);
- I2idf:=unapply(int(I1,y),y);
- I2:=expand(I2idf(fy[2])-I2idf(fy[1]));
- I2:=simplify(I2);
- MI[i,j]:=evalf(Int(I2,x=x0[1]..x0[2]));
- od: od:
- print(MI);

Теперь заполним матрицу целиком с помощью симметрии:
- for i from 1 to 3 do: for j from i to 3 do: MI[i,j]:=MI[j,i]: od: od:
- print(MI);

- Eigenvalues(MI);

Это главные моменты инерции.
- EVecsMI:=Eigenvectors(MI);
(Получившаяся в результате действия команды громоздкая выдача не приводится.)
Нам нужны графики трех собственных векторов. Далее приведем только команды Maple. Результат их выполнения опустим. Его легко увидеть самому.
- E1vMI:=convert(SubMatrix(EVecsMI[2],1..3,1..1),Vector);
- E1vMI:=Normalize(map(Re,E1vMI),Euclidean);
- E2vMI:=Normalize(map(Re,convert(SubMatrix(EVecsMI[2],
1..3,2..2),Vector)),Euclidean); - E3vMI:=Normalize(map(Re,convert(SubMatrix(EVecsMI[2],
1..3,3..3),Vector)),Euclidean); - RMI:=Matrix([E1vMI,E2vMI,E3vMI]);
- R;
- E1MI := plottools[arrow]([0, 0, 0], E1vMI, .2, .4, .1, color=red):
- E2MI := plottools[arrow]([0, 0, 0], E2vMI, .2, .4, .1, color=blue):
- E3MI := plottools[arrow]([0, 0, 0], E3vMI, .2, .4, .1, color=green):
Собственные векторы матрицы MI дают оси, вращение тела вокруг которых возможно без смещений.
Заметьте, что если движение относительно осей с экстремальными собственными значениями стабильно, то для оси, обусловленной промежуточными собственными значениями, вращение нестабильно (есть колебания; нестабильность в уравнении Эйлера).
Поразительно, что в механике вращения для тела любой формы (например, помидора) можно найти три оси, вокруг которых возможно чистое вращение без смещающих импульсов. Наиболее близкая форма для описания томата – эллипсоид. Рисунок 4.7.6 показывает, что оси стабильного вращения совпадают с осями, перпендикулярными сечению эллипсоида.
- display(E1MI,E2MI,E3MI,QFp,axes=boxed);
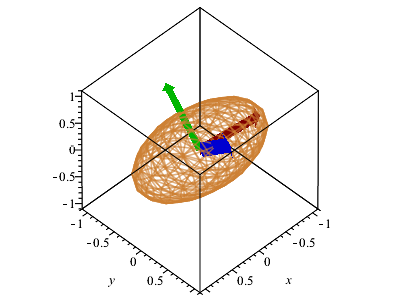
Рис. 4.7.6
Собственные векторы матрицы момента инерции выглядят так же, как собственные векторы, диагонализующие квадратичную форму. Ниже дается пример двух матриц с одним набором собственных векторов, но с разными собственными значениями.
Можно найти векторы, которые одновременно являются собственными векторами матрицы А (что определяет геометрическую форму) и моментами инерции матрицы MI. Эти матрицы различны и имеют разные собственные значения. Согласно теореме линейной алгебры, если две матрицы коммутируют (т. е. для них произведения A.B и B.A одинаковы), то для них можно найти общий набор собственных векторов.
Воспользуемся свойствами.
Вначале ортогональность собственных векторов матрицы MI:
- E1vMI.E2vMI;

- E1vMI.E1vMI;

Конечно, собственные векторы матрицы MI перпендикулярны. Попробуем получить результат, редактируя предыдущие команды.
Следующие три строки показывают, какие собственные векторы матрицы MI соответствуют главным осям эллипсоида:

- E2v.E1vMI;

- E3v.E1vMI;

Первый вектор матрицы MI соответствует второму собственному вектору квадратичной формы:
- E1v . E2vMI;

- E2v . E2vMI;

- E3v . E2vMI;

- E1v . E3vMI;

- E2v . E3vMI;

- E3v . E3vMI;

Здесь меняется знак. Собственные векторы определяются с точностью до постоянного множителя. На рис. 4.7.7 показаны все векторы и QF.
- display(E1,E2,E3,E1MI,E2MI,E3MI,QFp,axes=boxed);
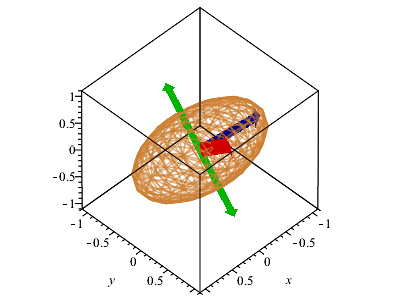
Рис. 4.7.7
Рассчитаем коммутатор двух матриц – той, что для QF, и матрицы MI.
- A . MI - MI . A;

Понятно, что произведения A.MI и MI.A – это одно и то же с точностью численного расчета.
Воспользуйтесь соотношениями между главными осями квадратичной формы и главными осями матрицы момента инерции. Рассмотрите матрицы А, для которых форма близка к круговому сечению, т. е. найдите такие матрицы A, для которых два собственных вектора очень близки.
Что произойдет с собственными векторами, если два собственных значения очень близки? Какая форма дает три одинаковых собственных значения?